The ocean underneath the sea ice is typically observed using fixed moorings, shipborne observations, or drifting buoys placed on the ice. Autonomous platforms, such as Argo- or RAFOS floats, measure important parameters such as temperature and salinity, but also provide information about the currents underneath the ice based on how they drift. The latter is little known. However, these buoys rely on surfacing to acquire their position from GPS, transmit data, and communicate. The sea-ice cover prevents these buoys from surfacing, and thus, little information is available about where the measurements have been taken.
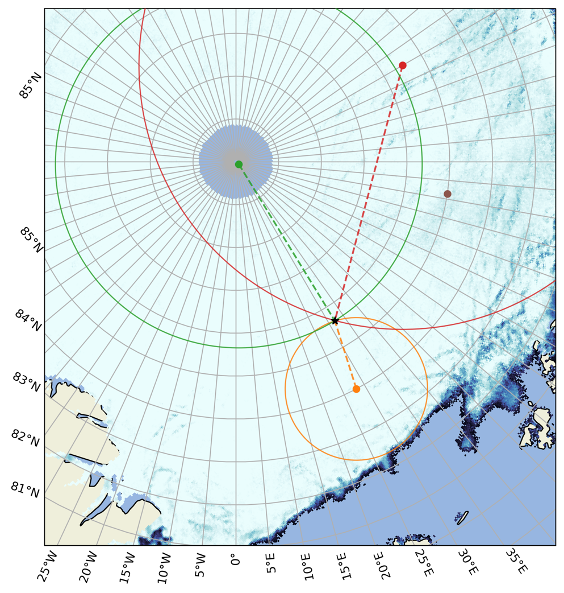
The objective is to geo-position floats and other moving underwater platforms collecting measurements under the ice. The acoustic signals transmitted by the sources on the moorings in the field experiment will be used for this. Drifting buoys and floats will be deployed with receivers listening for the signals. The ranges from the receiver to each sound source are estimated based on the measured travel times of the signals, and the sound speed in the area. These ranges are in turn used to estimate the position of the float, like the classical triangulation. An example is shown in the figure below, where the range from three different sources (circles) to a target (black star) is illustrated by range rings. The intersection between these rings indicates the position of the target.
Existing acoustic and oceanographic data from the CAATEX experiment, together with other available data and ocean reanalyzes, will be used to develop methods and tools to facilitate localization using the 35 Hz signals.